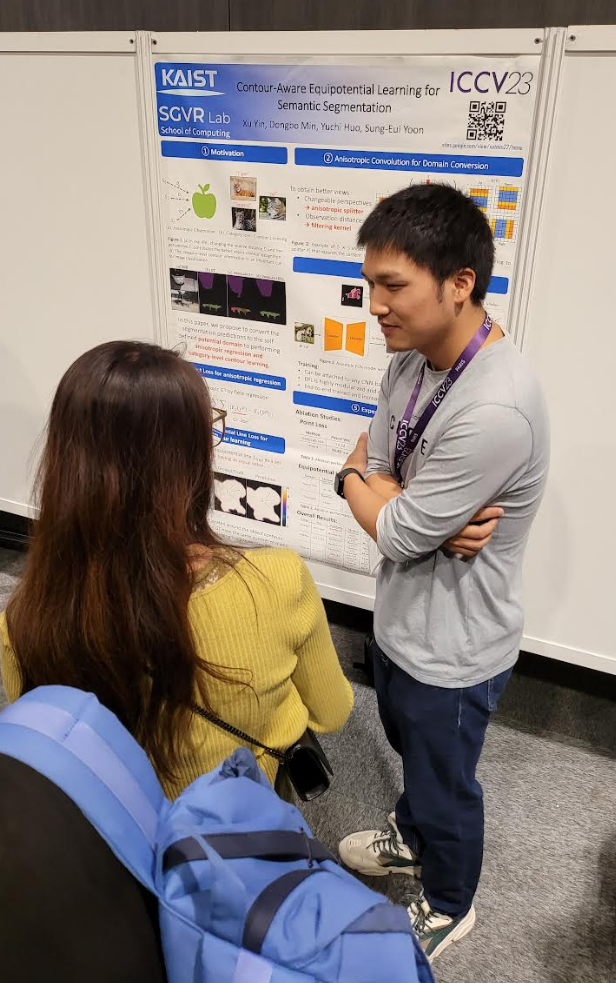
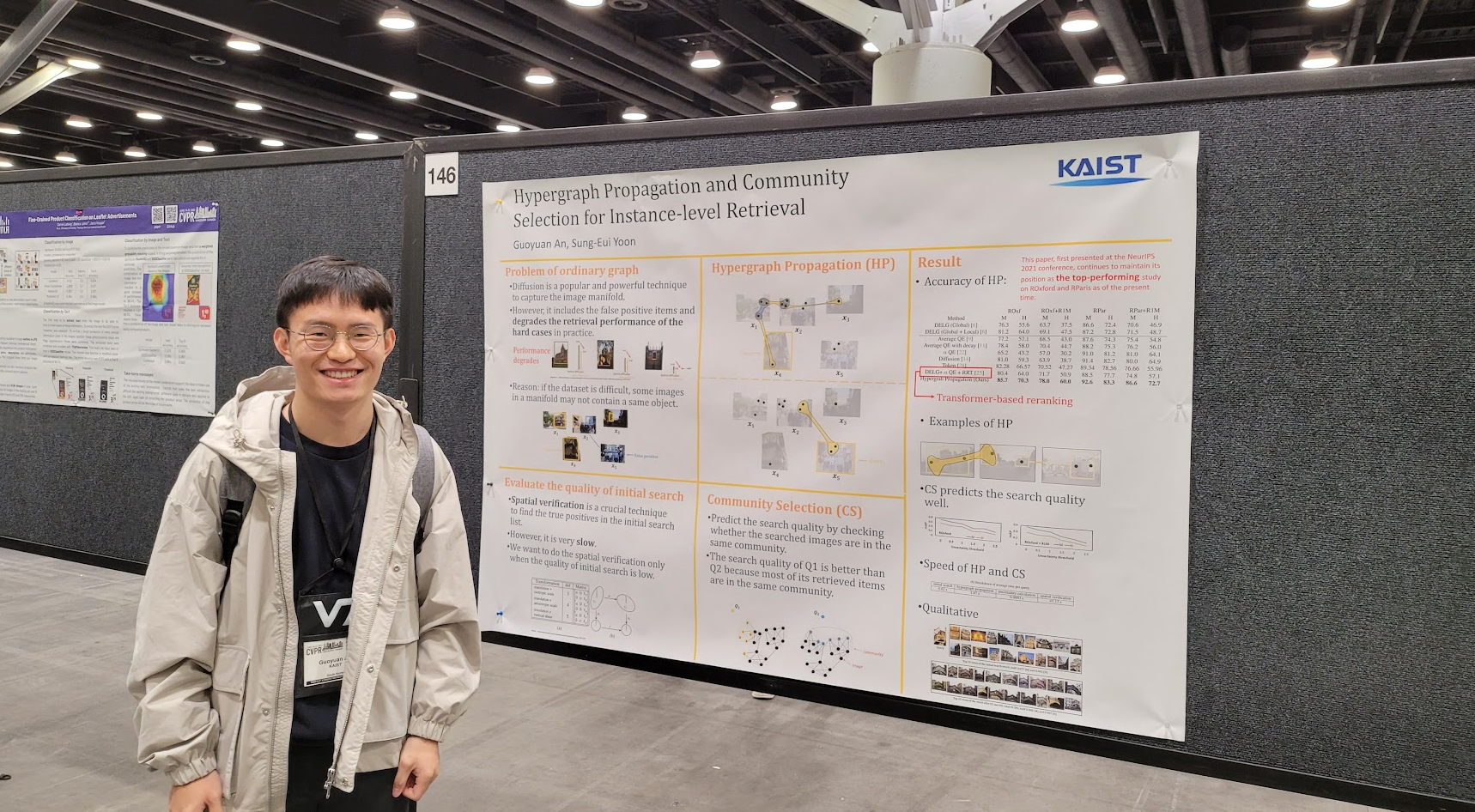
At the ICCV2023 conference, Guoyuan An presented his paper, “Towards Content-based Pixel Retrieval in Revisited Oxford and Paris.” This research introduced the innovative concept of pixel retrieval, along with associated benchmark datasets.

TopInternational Conference on Computer Vision (ICCV), 2023








{kind=link}