Conduct a Tutorial Session at KCC2024
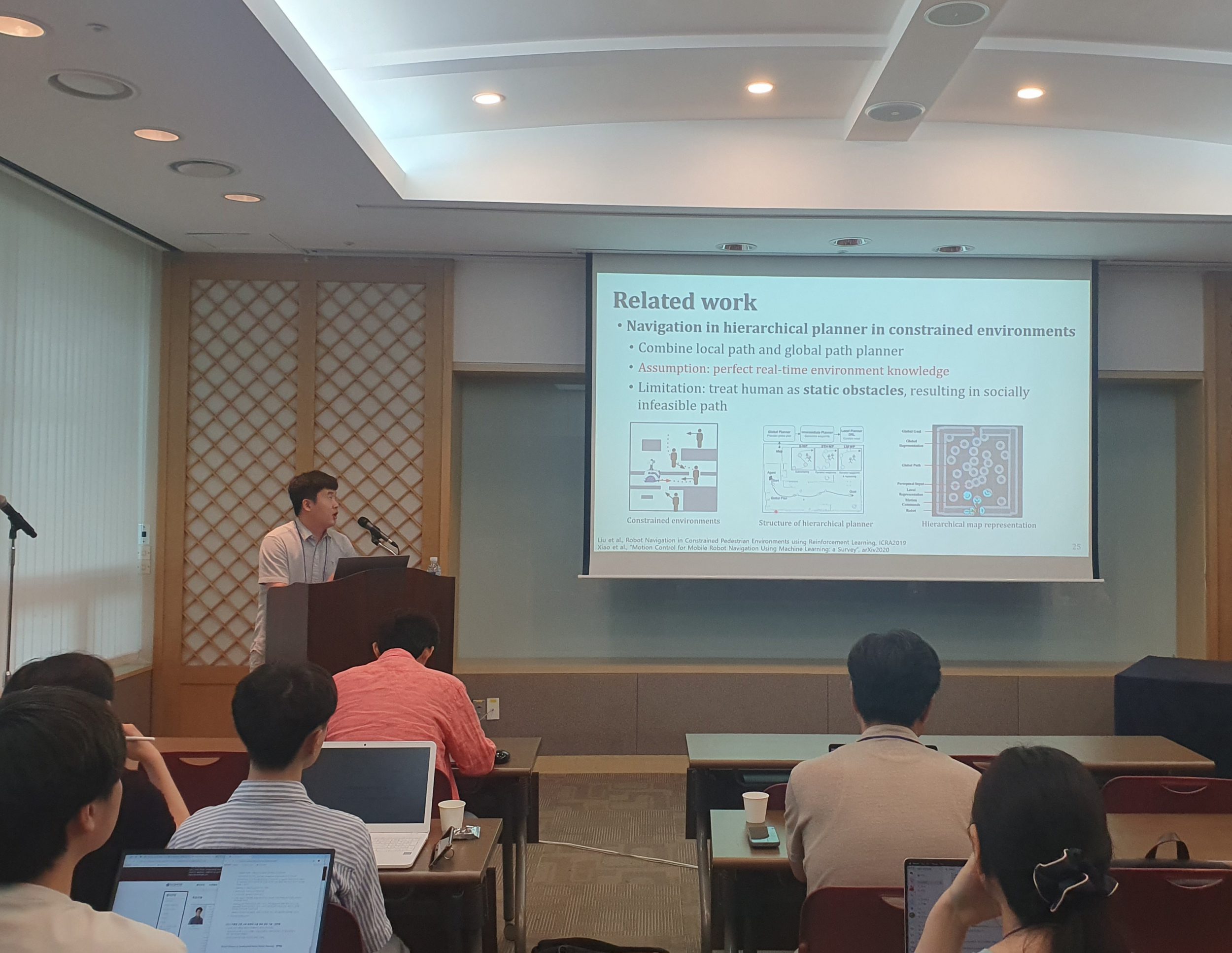
Professor Yoon and his Ph.D. students, Sebin Lee, Minsung Yoon, Mincheul Kim, and M.S. student Jeil Jeong, conducted a tutorial session at the KCC2024 conference. The topic of this tutorial was “Advancements in Robot Motion Generation Techniques: From Sampling-Based to Reinforcement Learning and Applications (로봇 모션 생성 기법의 발전: 샘플링 기반에서 강화 학습 및 응용까지).”
Sebin introduced sensor technology for robot environmental perception. Minsung covered reinforcement learning techniques and their applications to robotic arms. Mincheul presented techniques for generating social paths for robots considering crowds through the integration of external sensors. Jeil explained recent advances in quadrupedal robot motion planning.



KCC2024 Conference
Professor Yoon and some of his Ph.D. and M.S. students attended the KCC2024 conference in Jeju from June 26th to June 28th, 2024. At the conference, they participated in paper presentations, tutorials, Ph.D. forums, and top conference sessions. Additionally, we had the opportunity to have a meal and chat with people from LG Electronics’ VS Business Division. We also visited the Arte Museum and enjoyed delicious meals, spending a fun and enjoyable time with lab members.


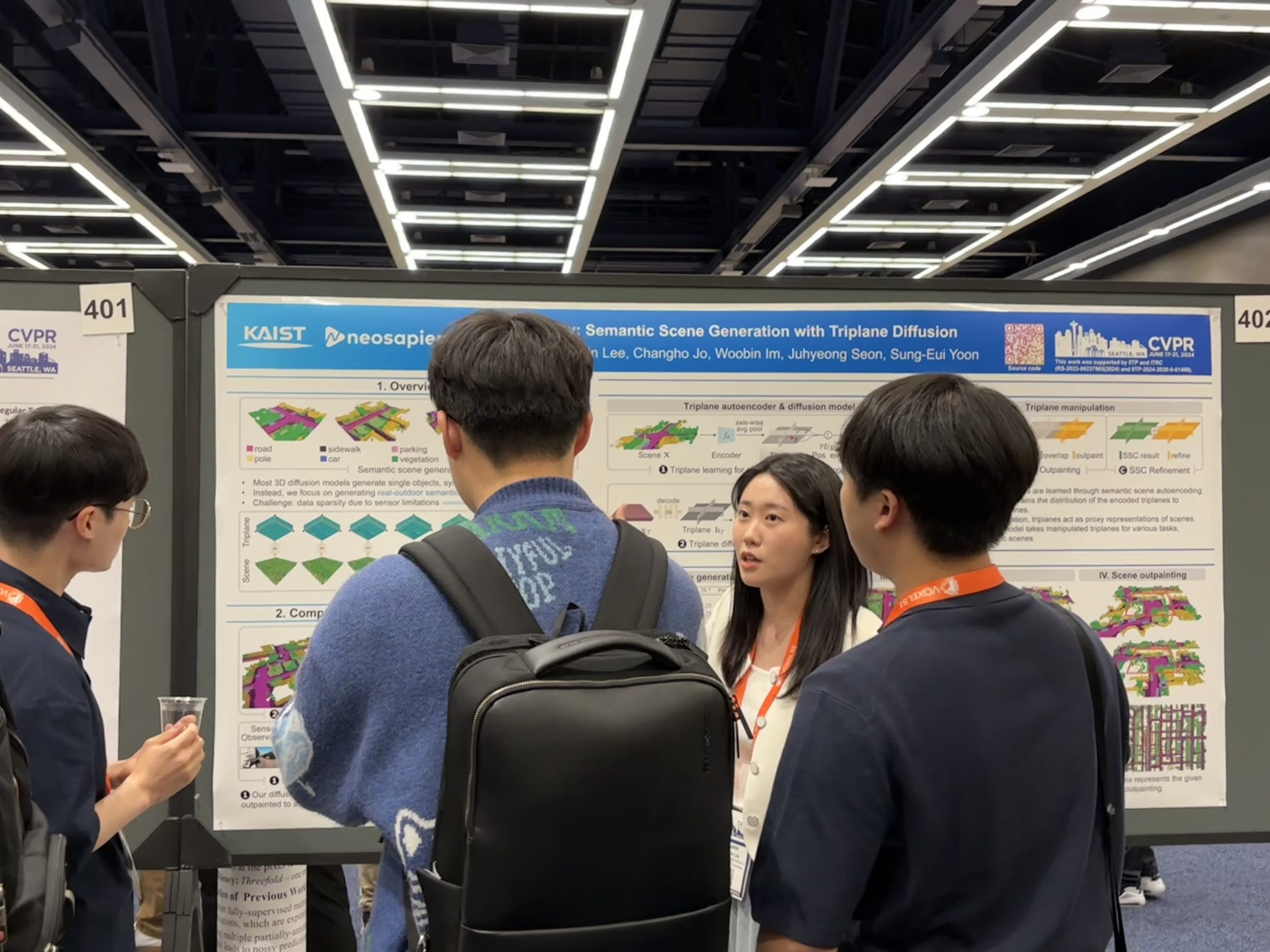
Jumin and Sebin Presented Poster at CVPR2024
Jumin Lee and Sebin Lee presented their recent research, “SemCity: Semantic Scene Generation with Triplane Diffusion,” at CVPR 2024 in Seattle. This study introduces SemCity, a 3D diffusion model for generating realistic outdoor scenes using a triplane representation, enabling tasks like scene inpainting and semantic completion. Their method achieves notable results on the SemanticKITTI dataset, supporting flexible object manipulation and large-scale scene generation.
Youngju Presented Poster at CVPR2024
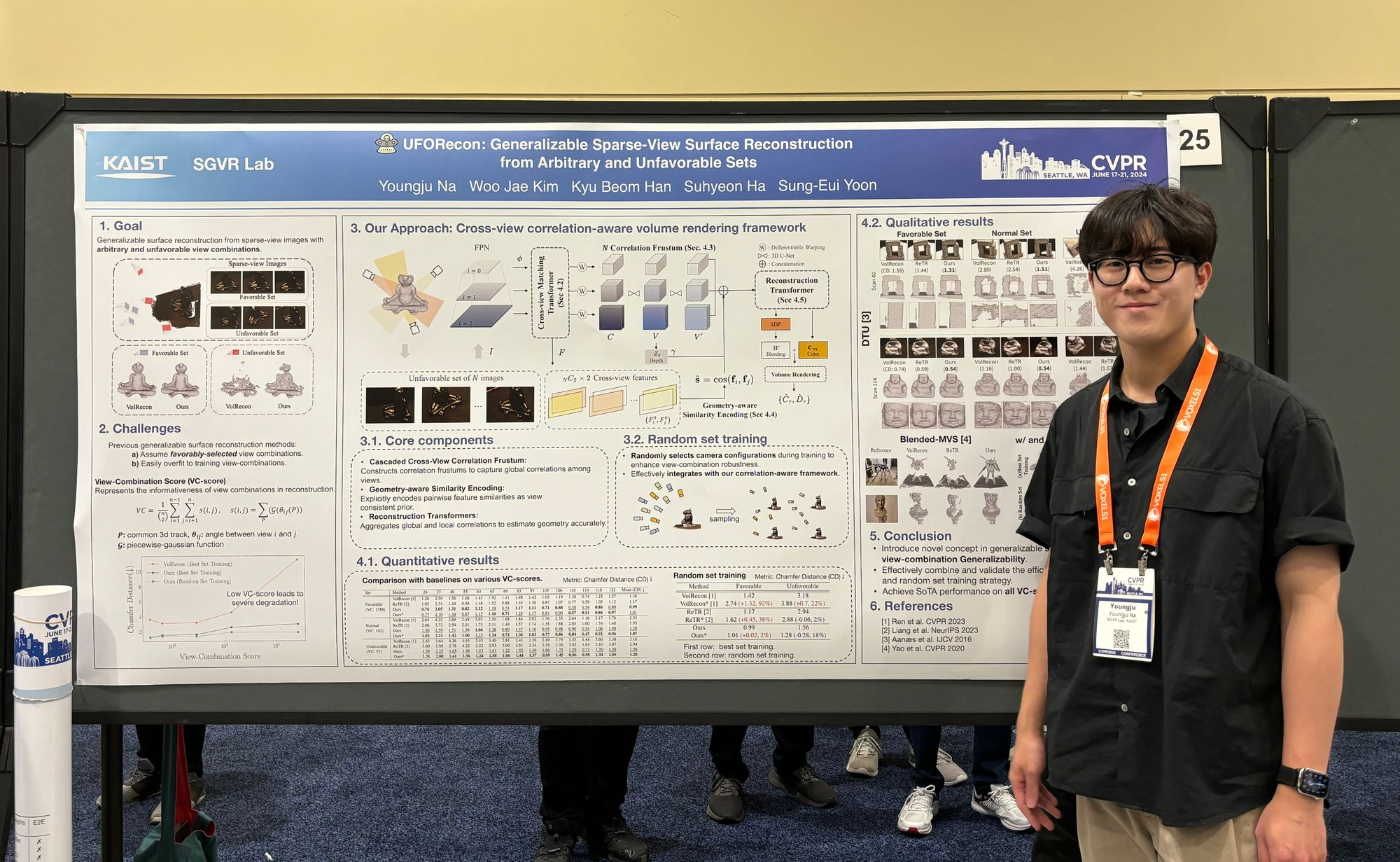
On June 17th, Youngju Na presented his recent research, UFORecon, at CVPR 2024, Seattle. The proposed work addresses the problem of generalizable surface reconstruction given a limited number of multi-view images under arbitrary and unfavorably captured conditions. It introduced a novel concept called “view-combination generalizability” in the few-shot NeRF scheme and effectively addressed it with a correlation-aware volume rendering pipeline.
CVPR2024 Conference
Professor Yoon and his Ph.D. students, Sebin Lee, Suhyeon Ha, and Jumin Lee, along with Master’s student Youngju Na, attended the CVPR 2024 conference in Seattle, USA, from June 17th to June 21st, 2024. At the conference, we had the opportunity to reconnect with our lab alumni Inkyu An, Changho Jo, and current lab member Chungsu Jang. We enjoyed a delightful time walking together, catching up on recent events, and exchanging research ideas and thoughts.


IV 2024 Workshop
Taegeun Yang presented a workshop paper at the IEEE IV2024 Workshop on Off-Road Autonomy, held from June 2nd to 6th, 2024. His presentation focused on the research topic “Analysis of Terrain-Aware Optimal Path Planning Methods for Stable Off-Road Navigation”. This research introduces an optimal path planning algorithm that considers terrain features to ensure stable off-road navigation, enhancing the vehicle’s ability to navigate various off-road conditions effectively and thereby improving stability.

MS Defense of Yaxin, Juhyeong, and Woojung
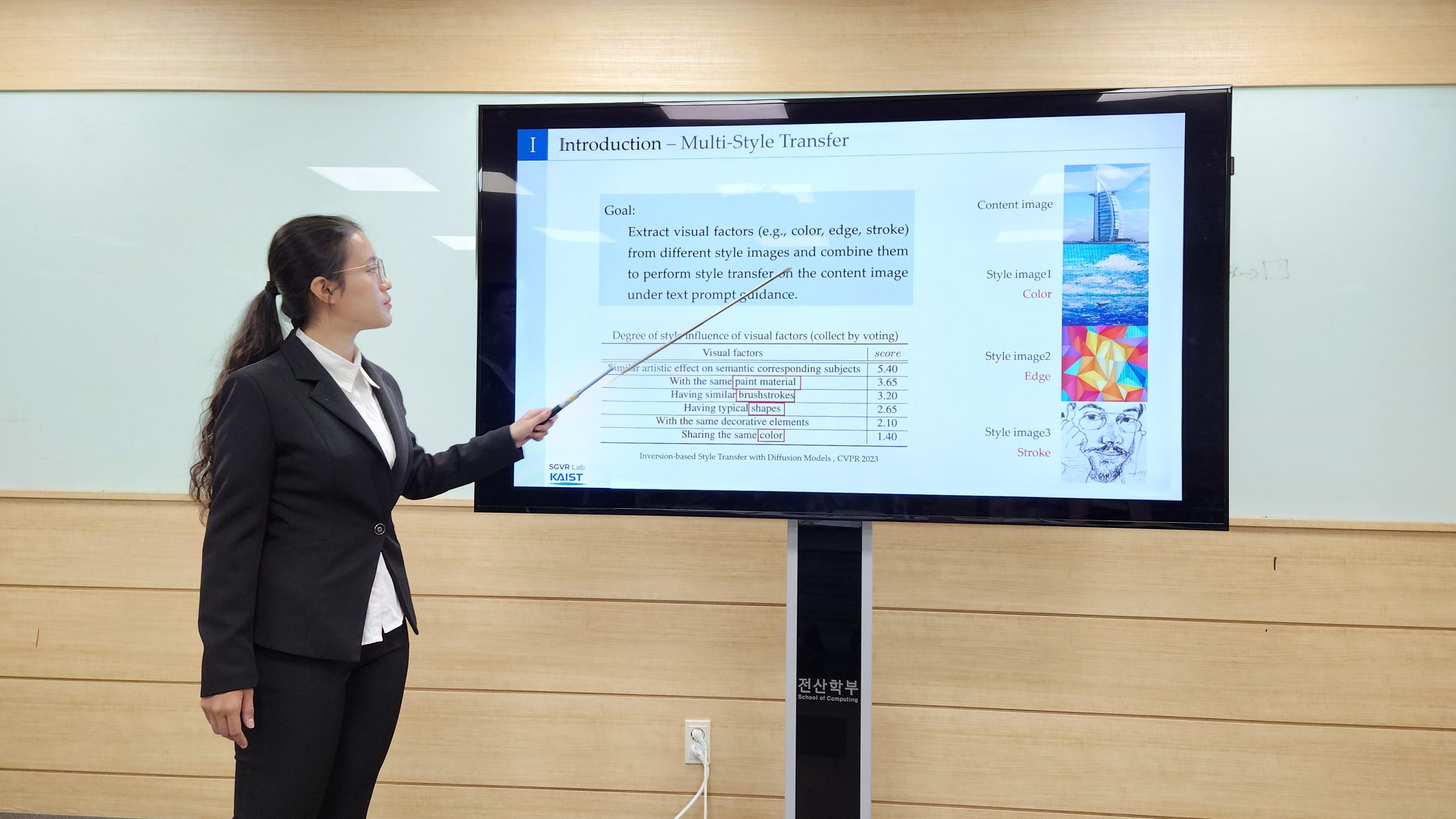
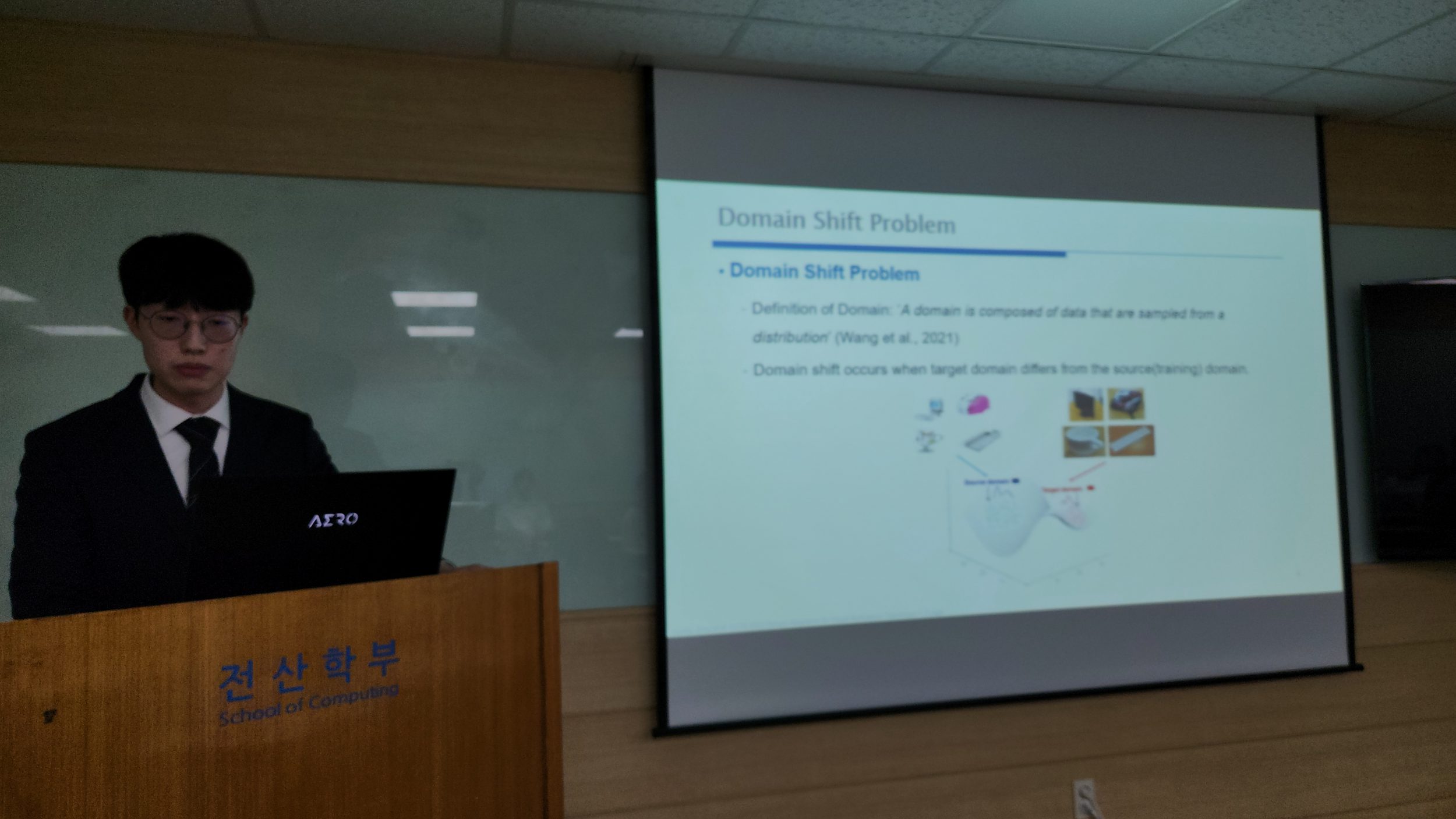
Our lab members Yaxin, Juhyeong, and Woojung successfully defended their theses on June 6th, 2024. Yaxin presented her research thesis “Controllable Multi-Style Transfer with Diffusion Models.” Juhyeong introduced his research “SAM-based Audio-Visual Segmentation with Spatio-Temporal, Bidirectional Audio-Visual Attention.” Woojung explained his research “Towards Robustness against Domain Shift in Image Classification and Retrieval.”
Congratulations on all your hard work over the past two years!

Taegeun Presented Workshop Poster at ICRA 2024
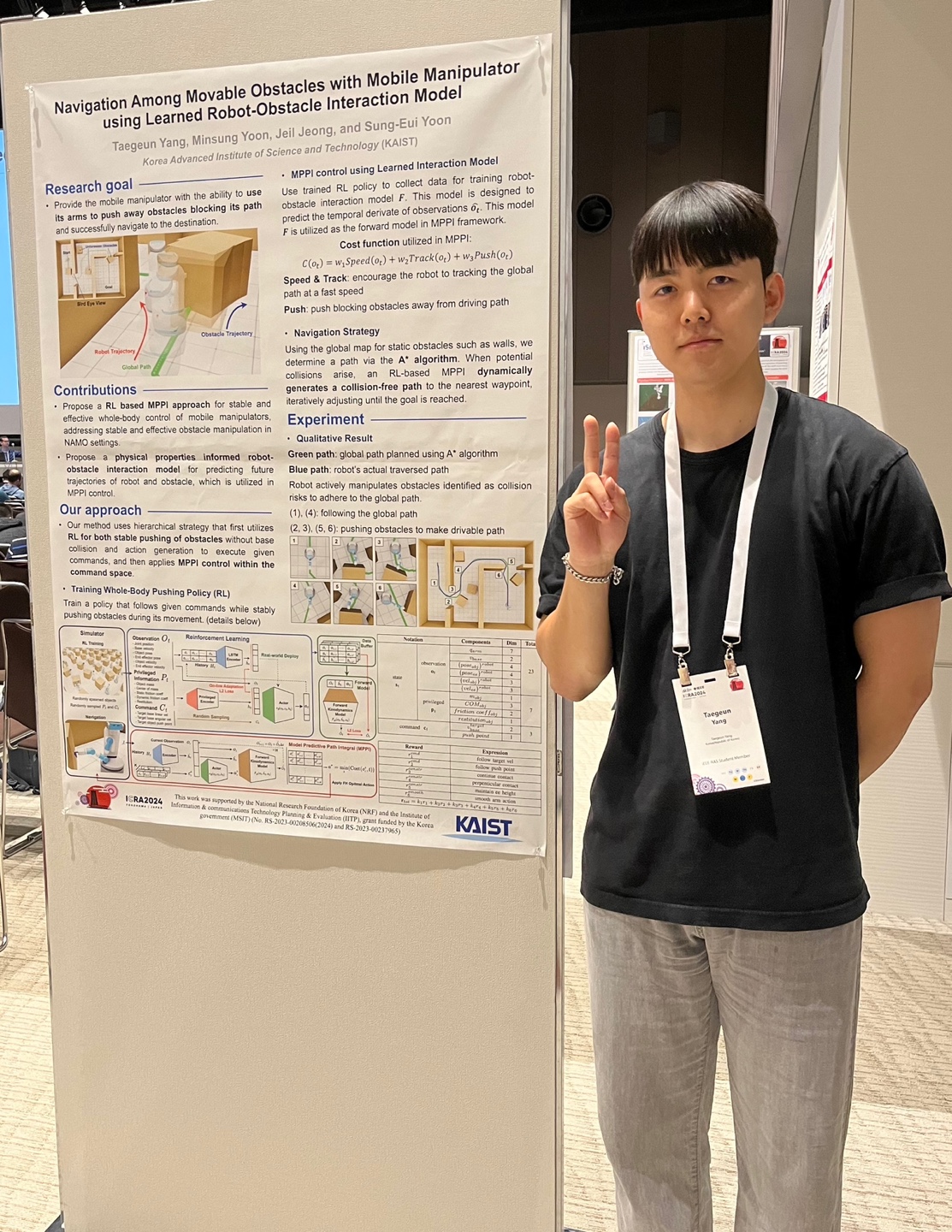
On May 13th, Taegeun Yang presented his research at the ICRA2024 Workshop on MOMA.v2. He shared his paper, “Navigation Among Movable Obstacles with Mobile Manipulator using Learned Robot-Obstacle Interaction Model.” This research introduced an innovative concept that enables mobile robots to push away obstacles blocking their path, allowing them to successfully navigate to their destination.
Minsung Presented Workshop Poster at ICRA 2024
On May 13th, Minsung Yoon presented his research at the ICRA2024 Workshop on Agile Robotics. He discussed his paper, “Adaptive Self-Balancing Control for Quadruped Robots against 6-DoF Independent Platform Movements.” This research introduced an innovative concept addressing the challenges faced by quadruped robots operating on dynamic platforms with unpredictable movements.
ICRA 2024 Conference
Professor Yoon and his Ph.D. student Minsung Yoon, along with Master’s student Taegeun Yang, attended the ICRA2024 conference held in Yokohama, Japan, from May 13th to 17th, 2024. At the conference, we had the pleasure of reconnecting with Jinwon Kim, a robotics researcher at Gost Robotics Technology and a former Master’s degree student from our lab. We had a great time having a meal together, catching up, and sharing our thoughts and concerns as researchers.


Woobin’s PhD Defense
Our PhD student, Woobin Im, successfully completed his PhD defense on May 2nd. He presented his research, “Advancing Video Motion Learning with Deep Features and Physics-Based Priors”. Woobin, thank you for your hard work. We are always proud of you and respect you.

Cherry Blossom Picnic
On Aprial 5th, we enjoyed a spring cherry blossom picnic at Eoeun-dongsan with our lab members. It was a great way to feel the spring in the air and heal with people. We also had lunch together and built stronger friendships.

KAIST Strawberry Party
On March 28th, we attended the KAIST Strawberry Party with some of our lab members.
It was a great time to catch up over delicious strawberries and refreshments.

Alumnus Chiwan Song’s Hyundai Mobis information session
Our laboratory alumnus, Senior Chiwan Song, visited our lab on March 8th and held a Hyundai Mobis information session. We were able to learn about the various activities at Hyundai Mobis and had the opportunity to ask questions about daily company life, which we had been curious about. Thanks to him, it was a very informative session.

Research Impact Award’s 1st recipient: Yoonki Cho
Yoonki Cho has been the first recipient of the Research Impact Award in our lab.
The Research Impact Award honors students whose research has significantly impacted their academic community, as evidenced by the number of citations their papers have garnered.
Yoonki Cho’s paper, “Part-based pseudo label refinement for unsupervised person re-identification (Y Cho, WJ Kim, S Hong, SE Yoon),” was accepted for the IEEE/CVF Conference on Computer Vision and Pattern Recognition 2022. Also, it has been cited 120 times as of March 6, 2024. This indicates that the research has made a significant impact and contributed greatly to the field.
Congratulations to Yoonki!

KRoC 2024 Conference
Our lab members, Jeil and Taeguen, presented posters at the KRoC 2024 conference hosted by the Korean Robotics Society from February 21st to 24th, 2024. Jeil presented on the research topic of “Reinforcement Learning Based Quadrupedal Robot Controller for Adaptive Motion Generation”. Taeguen presented on the topic of “Manipulator-Assisted Navigation Among Movable Obstacles using Learned Robot-Obstacle Kinodynamics Model”.