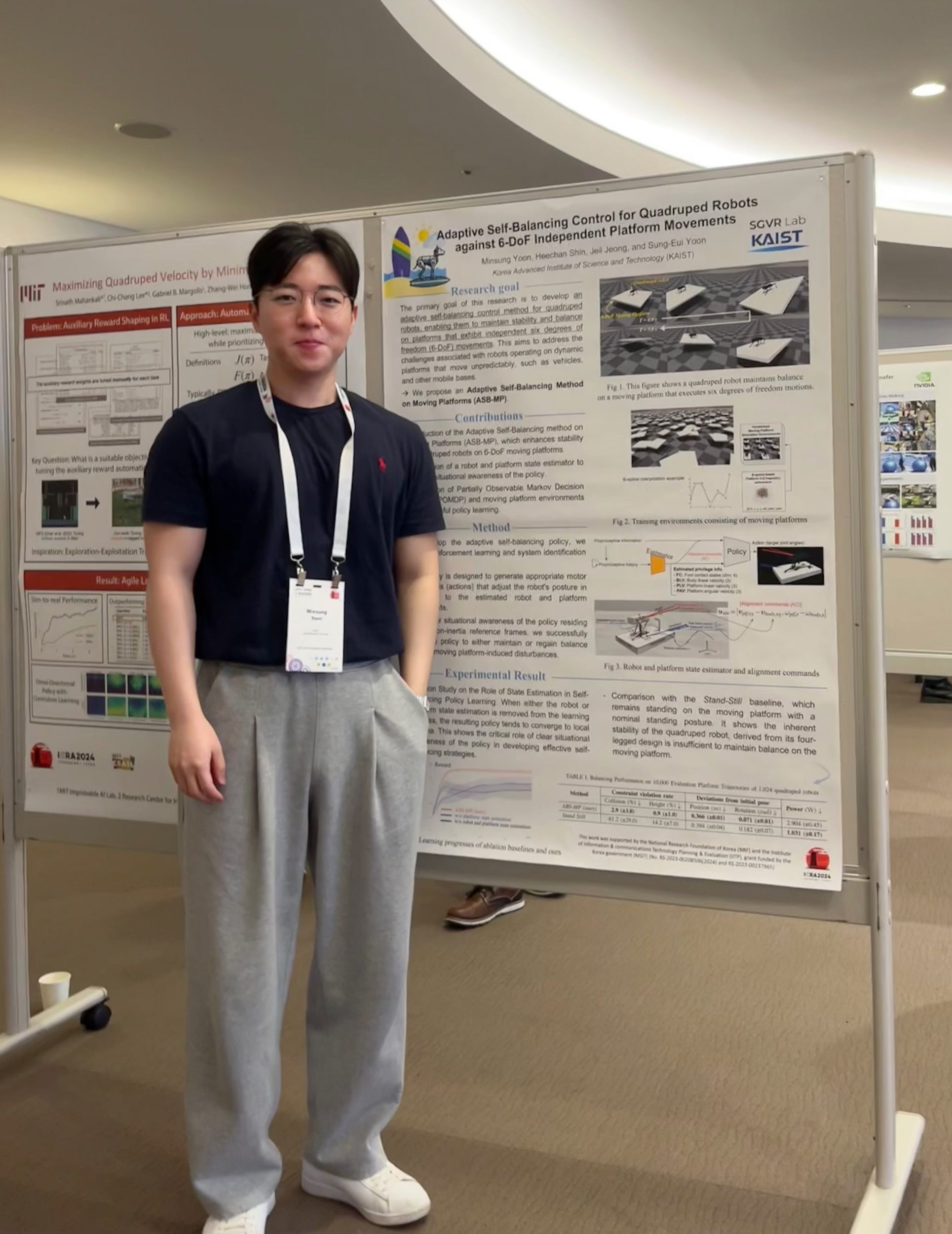
Minsung Presented Workshop Poster at ICRA 2024
On May 13th, Minsung Yoon presented his research at the ICRA2024 Workshop on Agile Robotics. He discussed his paper, “Adaptive Self-Balancing Control for Quadruped Robots against 6-DoF Independent Platform Movements.” This research introduced an innovative concept addressing the challenges faced by quadruped robots operating on dynamic platforms with unpredictable movements.
ICRA 2024 Conference
Professor Yoon and his Ph.D. student Minsung Yoon, along with Master’s student Taegeun Yang, attended the ICRA2024 conference held in Yokohama, Japan, from May 13th to 17th, 2024. At the conference, we had the pleasure of reconnecting with Jinwon Kim, a robotics researcher at Gost Robotics Technology and a former Master’s degree student from our lab. We had a great time having a meal together, catching up, and sharing our thoughts and concerns as researchers.


Woobin’s PhD Defense
Our PhD student, Woobin Im, successfully completed his PhD defense on May 2nd. He presented his research, “Advancing Video Motion Learning with Deep Features and Physics-Based Priors”. Woobin, thank you for your hard work. We are always proud of you and respect you.

Cherry Blossom Picnic
On Aprial 5th, we enjoyed a spring cherry blossom picnic at Eoeun-dongsan with our lab members. It was a great way to feel the spring in the air and heal with people. We also had lunch together and built stronger friendships.

KAIST Strawberry Party
On March 28th, we attended the KAIST Strawberry Party with some of our lab members.
It was a great time to catch up over delicious strawberries and refreshments.

Alumnus Chiwan Song’s Hyundai Mobis information session
Our laboratory alumnus, Senior Chiwan Song, visited our lab on March 8th and held a Hyundai Mobis information session. We were able to learn about the various activities at Hyundai Mobis and had the opportunity to ask questions about daily company life, which we had been curious about. Thanks to him, it was a very informative session.

Research Impact Award’s 1st recipient: Yoonki Cho
Yoonki Cho has been the first recipient of the Research Impact Award in our lab.
The Research Impact Award honors students whose research has significantly impacted their academic community, as evidenced by the number of citations their papers have garnered.
Yoonki Cho’s paper, “Part-based pseudo label refinement for unsupervised person re-identification (Y Cho, WJ Kim, S Hong, SE Yoon),” was accepted for the IEEE/CVF Conference on Computer Vision and Pattern Recognition 2022. Also, it has been cited 120 times as of March 6, 2024. This indicates that the research has made a significant impact and contributed greatly to the field.
Congratulations to Yoonki!

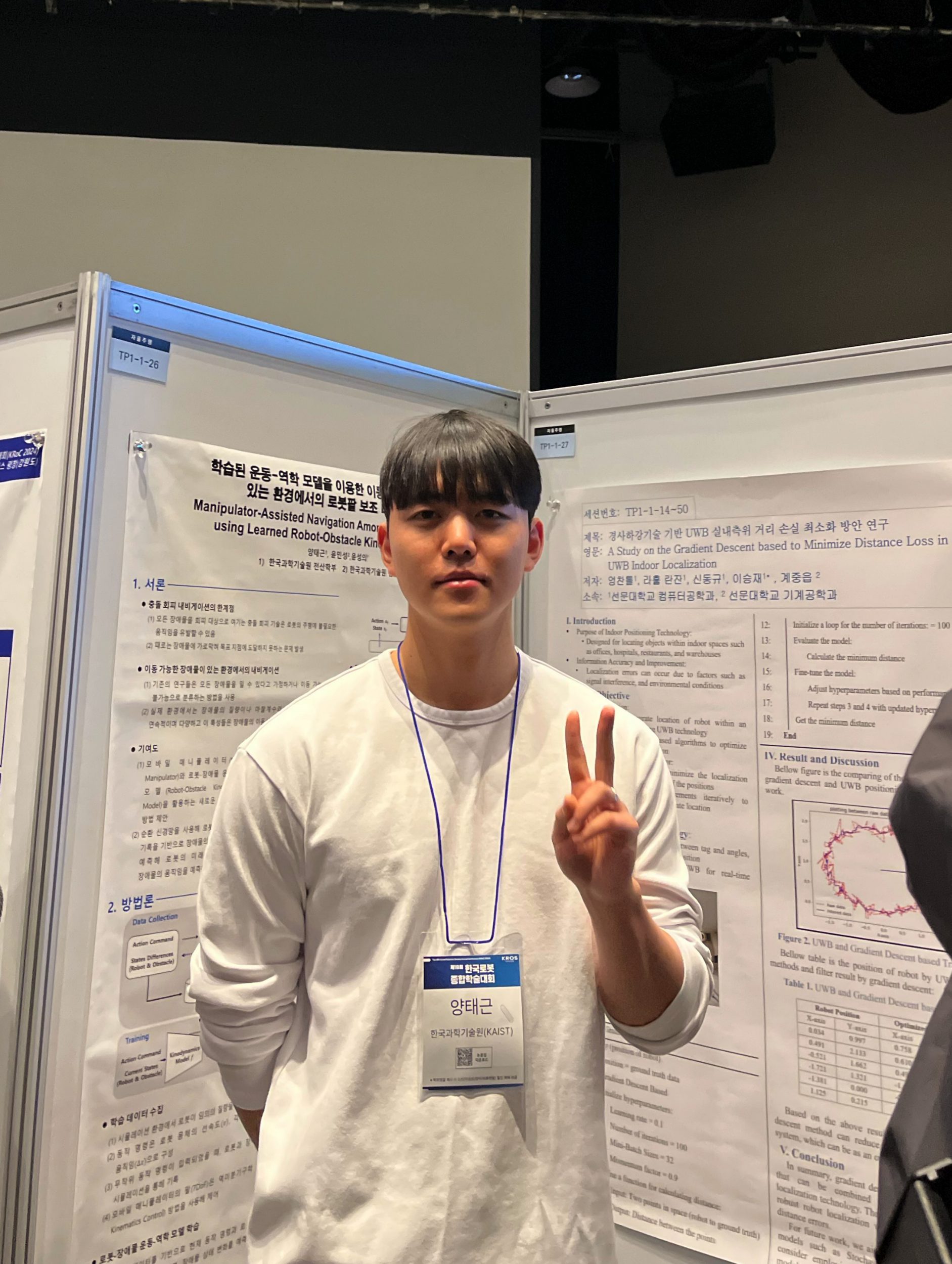
KRoC 2024 Conference
Our lab members, Jeil and Taeguen, presented posters at the KRoC 2024 conference hosted by the Korean Robotics Society from February 21st to 24th, 2024. Jeil presented on the research topic of “Reinforcement Learning Based Quadrupedal Robot Controller for Adaptive Motion Generation”. Taeguen presented on the topic of “Manipulator-Assisted Navigation Among Movable Obstacles using Learned Robot-Obstacle Kinodynamics Model”.

Graduation, 2024

Guoyuan’s PhD Proposal
Our PhD student, Guoyuan An, successfully finished his PhD proposal on January 30th. Guoyuan, thank you for your hard work. We wish you the best of luck with the results!
Prof. Hwanjun Song’s Seminar
On January 19th, Professor Hwanjun Song from KAIST gave a seminar at our laboratory. He introduced his research area, “Learning with Noisy Labels.” His lecture was highly informative and especially beneficial for our lab’s research, which involves the use of various and large amounts of data.
Woo Jae Kim received the Qualcomm Innovation Fellowship
Woojae Kim, a PhD students in our lab, was chosen as the winner of Qualcomm innovation fellowship Korea 2023. His finalist paper titled “Feature separation and Recalibaration for Adversarial Robustness” was selected as an highlight paper for CVPR 2023, and this achievement once again proves his excellence. Congraturations!

계롱산 국립공원 수통골 산책
10월 27일에 계룡산 국립공원 수통골 방문하여 산책하고, 맛있는 점심식사를 하며 즐거운 시간을 보냈습니다. 오랜만에 가벼운 등산을 하며 맑은 공기를 마셨고, 연구실 사람들과 함께 이야기를 나누며 걷다보니 더욱 힐링되는 시간이 되었습니다. 맛있는 점심과 티타임을 즐기며, 친목도 더욱 돈독해졌습니다!

Prof. Yoon’s Role as Session Chair at PG2023
Prof. Yoon attended PG2023, held on Oct. between 10-13 in Daejeon, Korea. He acted as a session chair in the conference.

Guoyuan Presents Poster at ICCV 2023
At the ICCV2023 conference, Guoyuan An presented his paper, “Towards Content-based Pixel Retrieval in Revisited Oxford and Paris.” This research introduced the innovative concept of pixel retrieval, along with associated benchmark datasets.

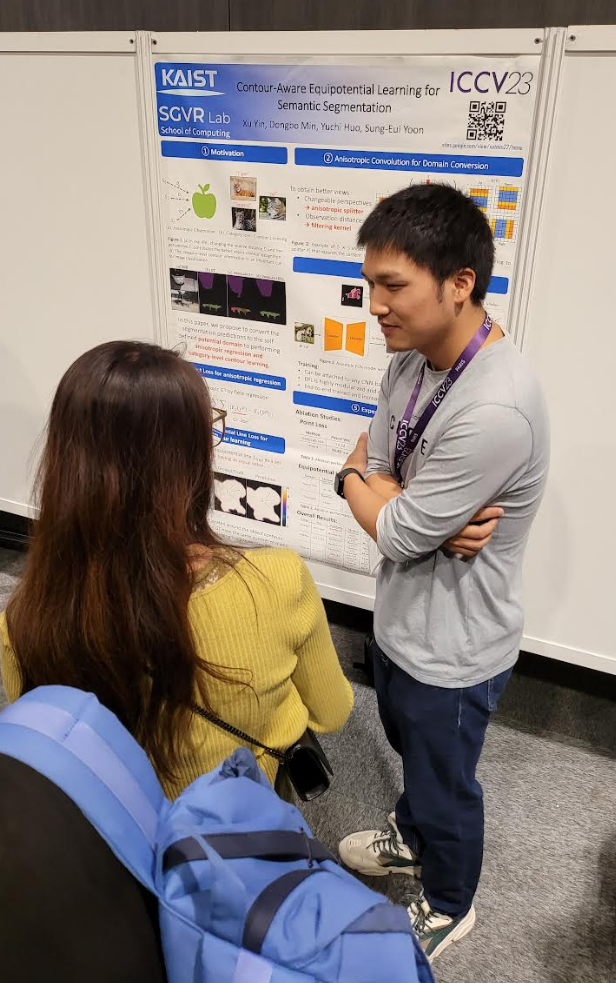
Xu Presents Workshop Poster at ICCV 2023
Xu Yin gave a presentation about his work at the ICCV2023 workshop (VIPriors). The paper is related to his journal paper titled “Contour-Aware Equipotential Learning for Semantic Segmentation“, published in TMM2022.