SIGGRAPH ASIA 2024
Professor Yoon and his Ph.D. students, Jaeyoon Kim and Kyubeom Han, attended the SIGGRAPH ASIA 2024 conference held at the Tokyo International Forum in Japan from December 3rd to December 6th, 2024. The conference provided a great opportunity for the team to connect, participate in various programs, exchange ideas, and stay updated on the latest trends. Additionally, we were able to meet our alumnus, YuChi, and have catch-up conversations, offering mutual support.

Chrysanthemum Festival Outing 
On November 4th, our lab visited the Chrysanthemum Festival at Yurim Park. We strolled among the fully bloomed chrysanthemums, enjoying relaxed conversations and a refreshing break. Afterward, we shared lunch together, strengthening our team bonds. It was a meaningful outing, made even more special by the chance to connect and enjoy time with everyone in the lab.

Seongjoo Presented Paper at IROS2024
Our PhD student SeongJoo Moon presented his work titled “LiDAR-camera Online Calibration by Representing Local Feature and Global Spatial Context” at IROS2024. This research proposes a Transformer-based framework for LiDAR-camera online calibration, addressing degradation in calibration accuracy caused by physical vibrations and environmental changes. By learning feature correspondences and integrating global spatial context, the method achieves superior calibration performance compared to existing benchmarks, enhancing perception systems for autonomous driving applications.
Mincheul Presented Paper at IROS2024
Our PhD student Mincheul Kim presented his work titled “CCTV-Informed Human-Aware Robot Navigation in Crowded Indoor Environments” at IROS 2024. This study, which has also been accepted for publication in RAL 2024, proposes a novel navigation framework that integrates CCTV data with deep reinforcement learning to overcome the limitations of onboard sensors, enabling robots to navigate crowded indoor spaces safely and efficiently. By leveraging external CCTV insights on human movements, the framework anticipates interactions, minimizes collisions, and generates socially acceptable paths, significantly improving navigation compared to methods reliant solely on local sensing.

Minsung Presented Paper at IROS2024
Our PhD student Minsung Yoon presented his work titled “Learning-based Adaptive Control of Quadruped Robots for Active Stabilization on Moving Platforms” at IROS2024. This research introduces Learning-based Active Stabilization on Moving Platforms (LAS-MP), a novel system that enables quadruped robots to balance effectively on six-DOF moving platforms by leveraging adaptive posture adjustment policies and state estimators trained on proprioceptive sensor data. The framework systematically addresses challenges caused by platform-induced inertia forces and showcases superior performance over baselines through trajectory generation, ablation studies, and detailed evaluations of its components.


IROS2024
Our Ph.D. students Seongjoo Moon, Mincheul Kim, and Minsung Yoon, along with our M.S. student Jiwoo Hwang, attended the IROS2024 conference held at ADNEC in Abu Dhabi, UAE, from October 14th to October 18th, 2024. The conference offered a great opportunity for the team to connect, participate in various programs, and exchange ideas. It was a valuable experience for discussing future research directions and staying updated on the latest developments in the field.

Prof. Bochang Moon Gives Seminar in CS482
Our lab alumnus, Prof. Bochang Moon, conducted a seminar on October 14, 2024, in the undergraduate graphics class, presenting his paper “Target-Aware Image Denoising for Inverse Monte Carlo Rendering.” This study develops a target-aware image denoiser to address the noise issue in scene parameter inference through physically based differentiable rendering. The seminar was highly beneficial for students, helping them understand the challenges in inverse rendering and learn about the latest advancements in noise reduction techniques.

Woojae Preseted Workshop Paper at ECCV2024
Our PhD student Woojae Kim presented his work titled “Protecting Copyrights of NeRF Models via Adversarial Attack” at the CV4Metaverse 2024 Workshop, held during ECCV 2024. This research explores adversarial attack techniques for safeguarding the copyrights of Neural Radiance Field (NeRF) models, offering valuable insights into model protection within the 3D field.
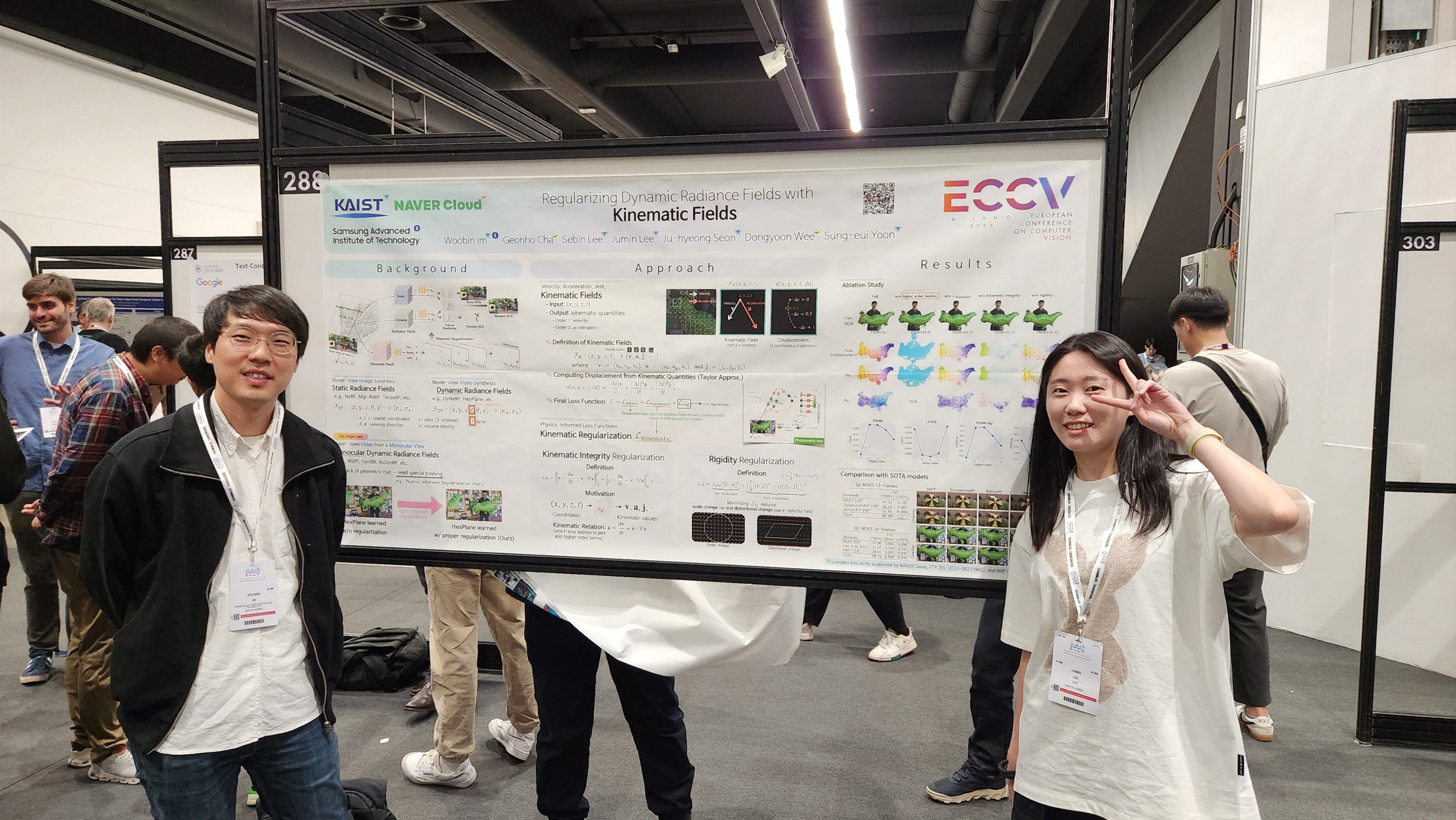
Woobin and Jumin Presented Paper at ECCV2024
Our lab alumni, Woobin Im, and PhD candidate, Jumin Lee, presented their paper titled “Regularizing Dynamic Radiance Fields with Kinematic Fields” at ECCV 2024, held from September 29 to October 4, 2024. This study introduces a method for reconstructing dynamic radiance fields from monocular videos by integrating kinematics, which captures motion through quantities like velocity and acceleration. Their approach outperforms state-of-the-art methods by accurately capturing physical motion patterns in challenging real-world videos.
ECCV2024 Conference
Professor Yoon and his Ph.D. students Woojae Kim, Jumin Lee, Jinhwan Seo along with alumnus Woobin Im attended the ECCV 2024 conference held in Milan, Italy, from September 29th to October 4th, 2024. The team enjoyed a wonderful time walking together, catching up on recent updates, and exchanging ideas on their latest research. It was a valuable opportunity to reconnect and discuss future directions in the field.


KAIST & RIKEN Joint Workshop
Professor Yoon participated in the KAIST & RIKEN-AIP Joint Workshop, which was held from September 26 to September 27 at KAIST.
Membership Training
On September 5th, we enjoyed a membership training (MT) at Jangtaesan with our lab members. We had a great time grilling barbecue and bonding through various games. It was a fun and meaningful experience together.


KAIA Conference
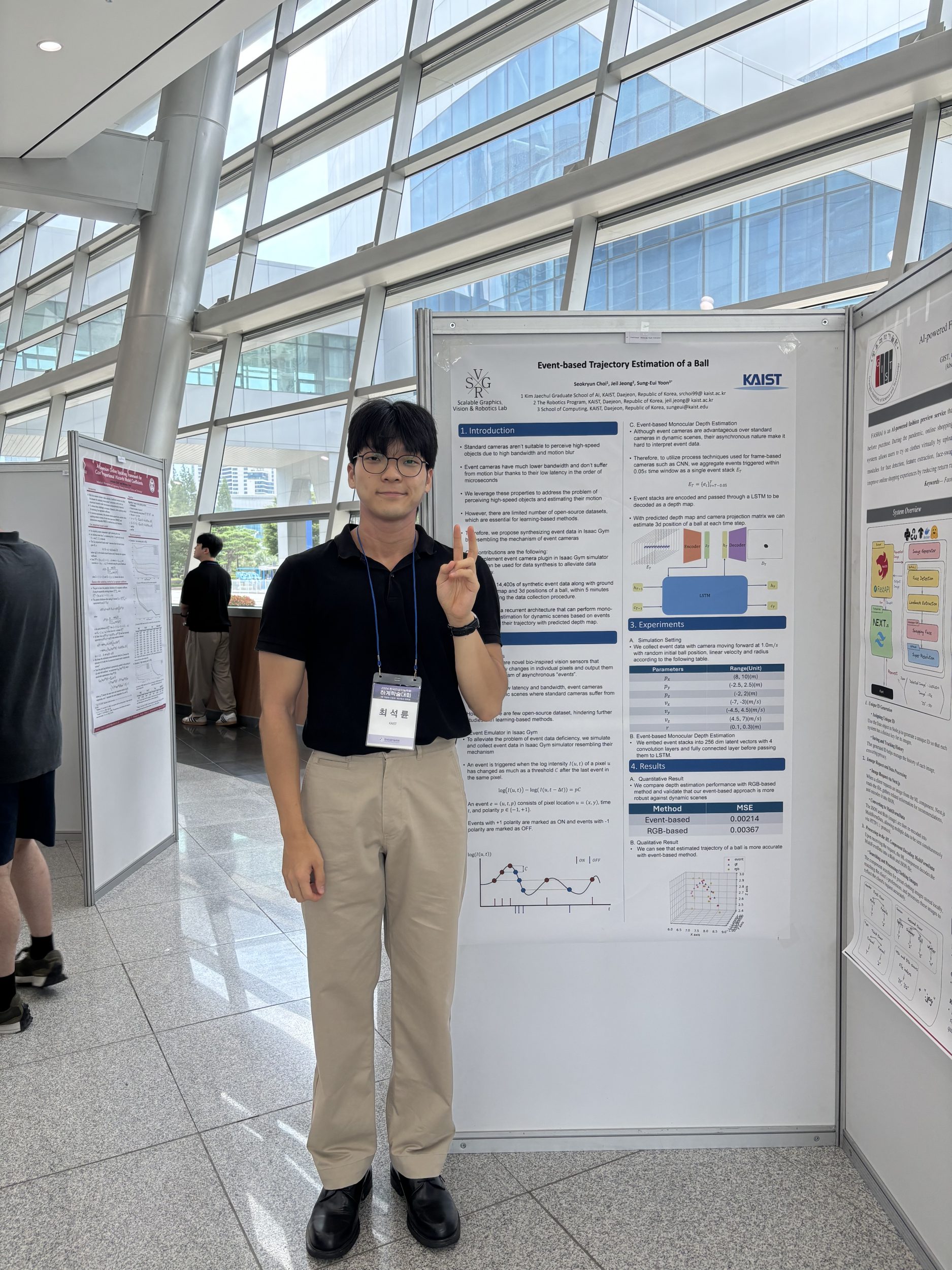
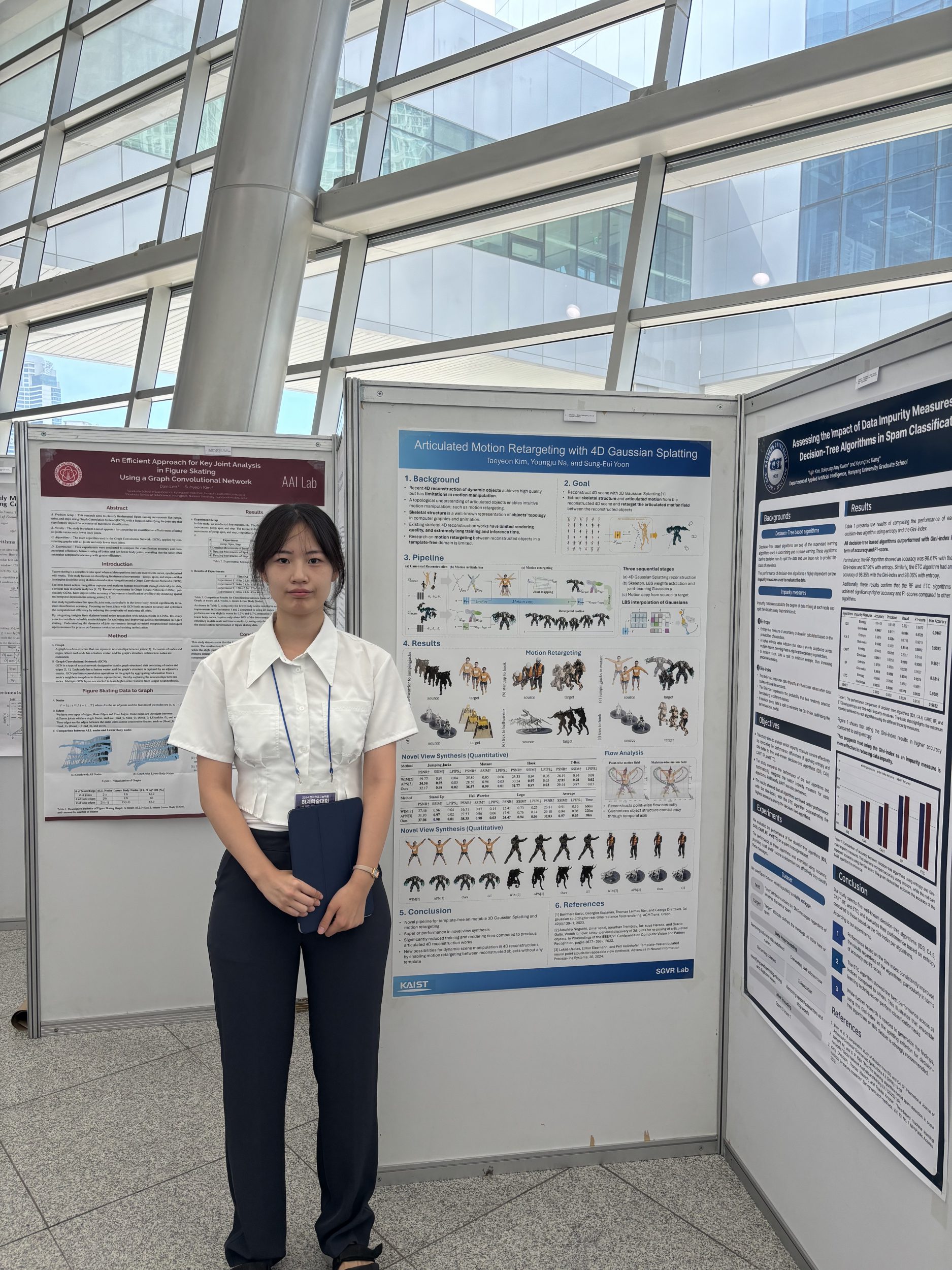
Professor Yoon and his M.S. students attended the KAIA2024 conference in Busan from August 15th to 17th, 2024. They presented their research papers and explored the latest advancements in artificial intelligence.
Seokryun Choi presented his paper, “Event-based Trajectory Estimation of a Ball,” which proposes synthesizing event data in Isaac Gym by emulating the mechanism of event cameras.
Taeyeon Kim presented her paper, “Articulated Motion Retargeting with 4D Gaussian Splatting,” which addresses the limitations of motion retargeting between reconstructed objects in a template-free domain.
The conference offered valuable opportunities that significantly enriched their academic experience.

Prof. Bochang Moon Presents Research at SIGGRAPH 2024
Our lab alumnus, Prof. Bochang Moon, participated in SIGGRAPH 2024, held in Denver from July 28 to August 1, and presented his research titled “Target-Aware Image Denoising for Inverse Monte Carlo Rendering.” This study addresses the noise issue that arises when inferring scene parameters through physically based differentiable rendering by developing a target-aware image denoiser. The research points out that using conventional image denoisers can lead to undesirable local minima due to denoising bias and proposes a new denoiser that incorporates target image information to overcome this limitation. By determining denoising weights through linear regression based on target images, this method enables more robust scene parameter inference in inverse rendering optimization.
Chanmi Presents Paper at KCC2024
Chanmi Lee presented a paper at the KCC2024 Conference in the Artificial Intelligence Applications section, held from June 26th to 28th, 2024. Her presentation focused on the research topic “Adversarial Attack on Visuomotor Policy.” This research reveals a vulnerability in vision-based visuomotor policies, particularly those trained with Soft Actor-Critic (SAC). To address this, she proposed a method to attack the policy, analyzing the robot’s movement path to evaluate how adversarial perturbations impact the robot’s decision-making process.
PhD Forum at KCC2024
Professor Yoon and his Ph.D. students, Woobin Im, Heechan Shin, and Guoyuan An, participated in the PhD Forum session at KCC2024. They presented their research and engaged in discussions with peers about their work. Additionally, they had the opportunity to dine with professionals from companies related to their research in Korea, allowing for valuable networking and in-depth conversations. This experience provided them with a meaningful opportunity to exchange ideas and deepen their understanding of their respective fields.