IEEE Transaction on Robotics (T-RO) 2019
Super Rays and Culling Region for Real-Time Updates on Grid-based Occupancy Maps
by Youngsun Kwon, Donghyuk Kim, Inkyu An, and Sung-Eui Yoon
Korea Advanced Institute of Science and Technology (KAIST)
Abstract
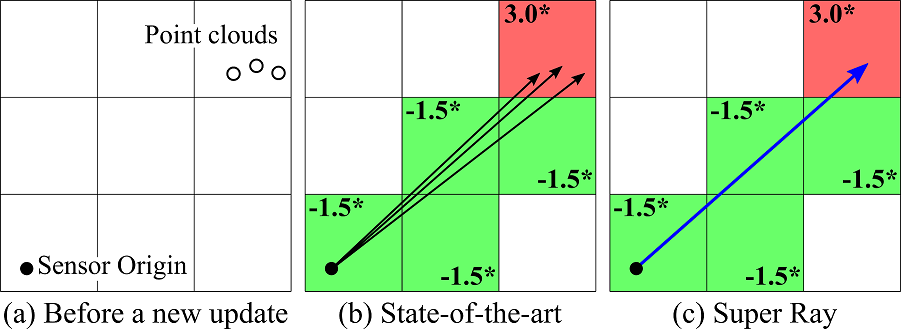
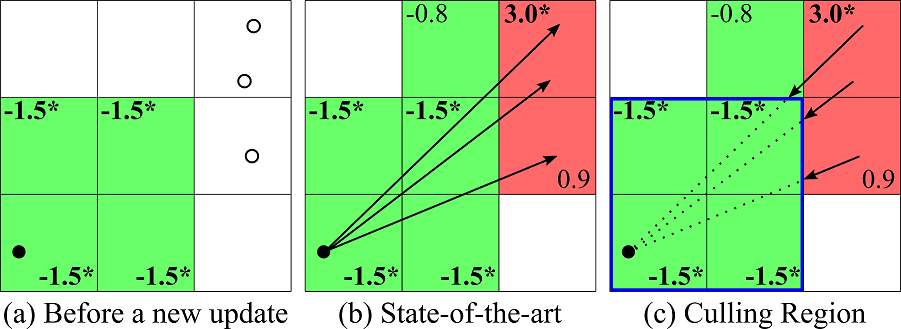
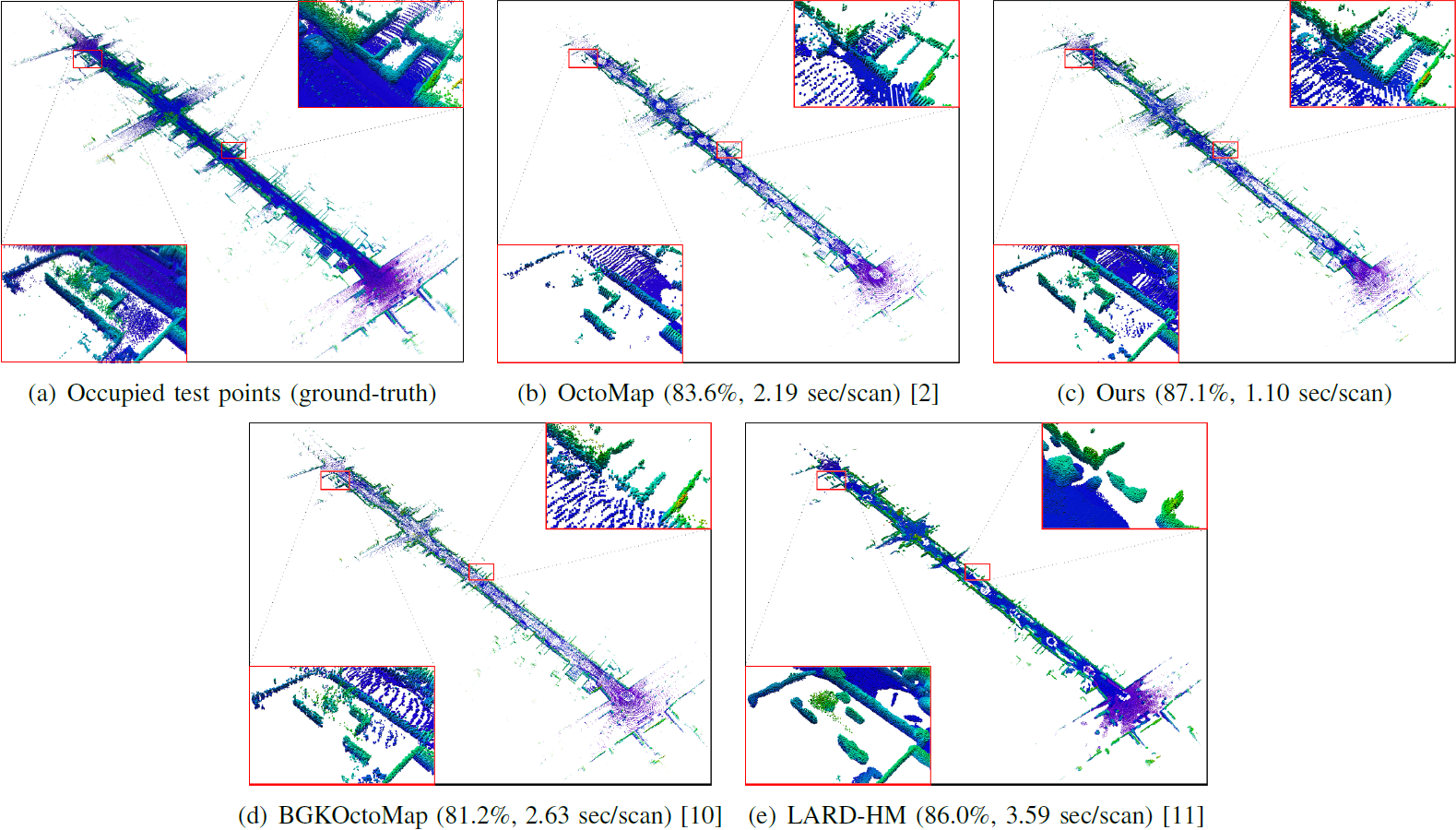
In this paper, we present two novel approaches, Super Rays and Culling Region, for efficiently updating gridbased occupancy maps with point clouds. Rays, which traverse from the sensor origin to the sensor data, update the occupancy probabilities of a map representing an environment. Based on the ray model, we define a super ray as a representative ray to multiple rays having the same traversal patterns during the map updates. Our super rays utilize the geometric information of rays and reduce the number of points used for updating the map. For constructing super rays efficiently, we propose mapping lines for handling 2D and 3D cases from an observation that edges or grid points branch out the traversal patterns on the map. Furthermore, we introduce a culling region using the occupancy states of the updated map for reducing redundant computations occurred in updates. The super rays perform the update process in a single traversal, and the culling region reduces the number of unnecessary traversals for updating the map. As a result, our combined method improves the update performance without compromising any representation accuracy of a grid-based map.We test the update performance of the proposed method using public indoor and outdoor datasets. Our combined approach shows up to 11.8 times and 2.8 times performance improvement over the state-of-the-art update methods of grid-based maps in the indoor and outdoor scenes, respectively. Also, we compare the update speed and the representation accuracy of our method using KITTI dataset over the state-of-the-art learning based occupancy maps. In a navigation scenario that raw point clouds are acquired in 10 Hz, our method shows the best performance on the update speed and thus the highest representation accuracy within a given time.
Contents
Paper: PDF (4.3MB)Source Code: GitHub page
Related links
Super Ray-based Updates for Occupancy MapsBibtex:
@article{kwon2019super,
title={Super rays and culling region for real-time updates on grid-based occupancy maps},
author={Kwon, Youngsun and Kim, Donghyuk and An, Inkyu and Yoon, Sung-eui},
journal={IEEE Transactions on Robotics},
volume={35},
number={2},
pages={482--497},
year={2019},
publisher={IEEE}
}