The 2019 World Congress on Advances in Nano, Bio, Robotics and Energy (ANBRE19)
An Objectness Score for Accurate and Fast Detection during Navigation
by
Hongsun Choi,
Mincheul Kang,
Youngsun Kwon, and
Sung-Eui Yoon
Korea Advanced Institute of Science and Technology (KAIST)
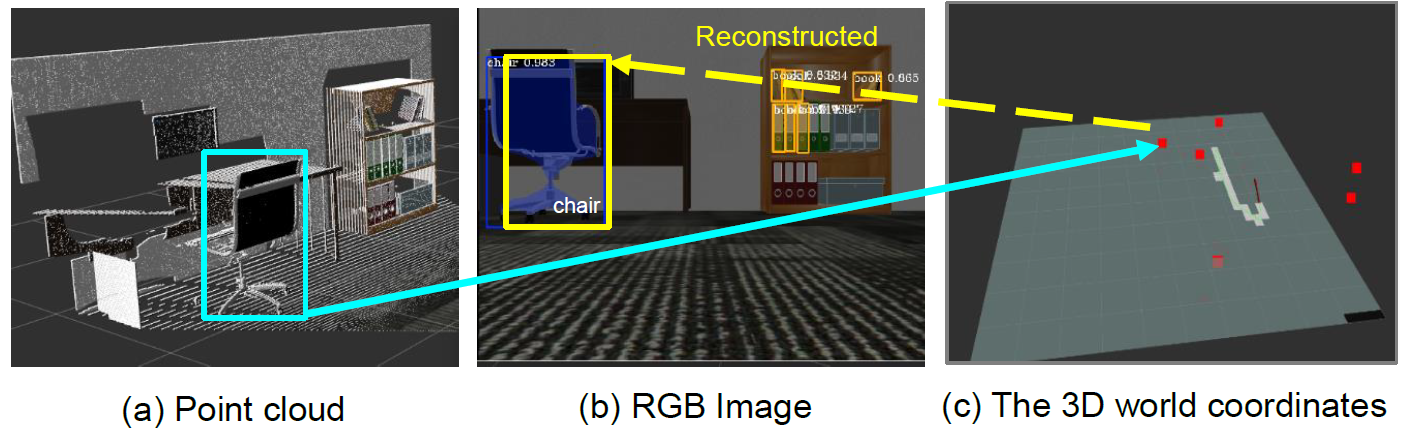
These figures show how our approach maintains the locations and classes of
detected objects in the 3D space, and reconstructs them onto the 2D image plane.
The images in (a) and (b) show a point cloud and RGB image from the RGB-D camera
mounted on a mobile robot. (c) is a reconstructed 3D map in the 3D world
coordinates. When the robot recognizes a chair during navigation, we obtain the
point cloud set in the 2D bounding box region of the chair (the box in (a)) and
convert the point cloud of the chair to a 3D location (the red point in (c)).
This 3D information contains the 2D bounding box location, class probability,
mean depth, etc. When the chair is observed in the field of view again, we then
project the 3D location of the previously detected object onto the RGB image
plane (the yellow box in (b)) using affine projection. Based on this information,
we can compare which class is more accurate between the reconstructed 2D bounding
box (the yellow box in (b)) and the currently detected 2D bounding box (the blue
box in (b)).
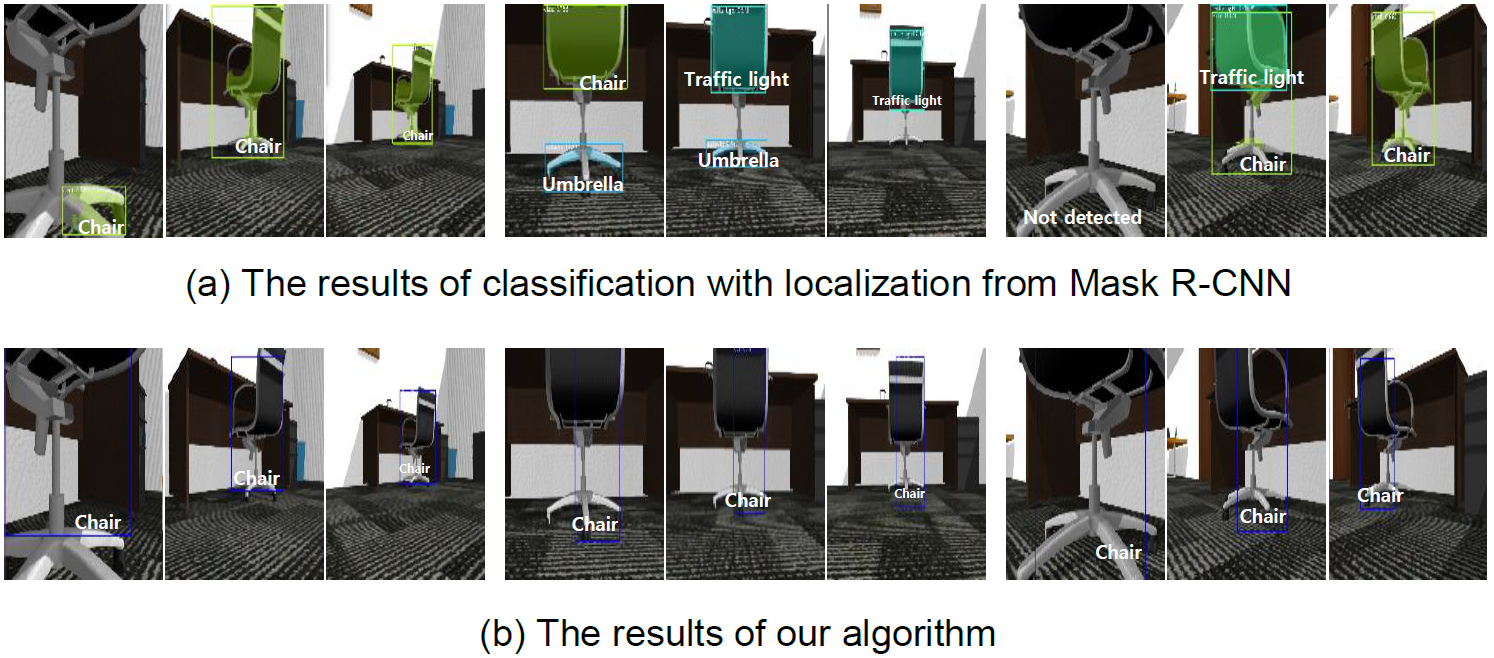
These image sequences show the results of classification with localization
during navigation of a mobile robot. Our method robustly identifies objects
during navigation.
Abstract
We propose a novel method utilizing an objectness score for maintaining
the locations and classes of objects detected from Mask R-CNN during mobile
robot navigation. The objectness score is defined to measure how well the
detector identifies the locations and classes of objects during navigation.
Specifically, it is designed to increase when there is sufficient distance
between a detected object and the camera. During the navigation process, we
transform the locations of objects in 3D world coordinates into 2D image
coordinates through an affine projection and decide whether to retain the
classes of detected objects using the objectness score. We conducted experiments
to determine how well the locations and classes of detected objects are
maintained at various angles and positions. Experimental results showed that
our approach is efficient and robust, regardless of changing angles and distances.
Contents
Paper: PDF (0.7MB)
|
|
|