
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2020
Adaptive Kernel Inference for Dense and Sharp Occupancy Grids
by Youngsun Kwon1, Bochang Moon2, and Sung-Eui Yoon1
1Korea Advanced Institute of Science and Technology (KAIST)
2Gwangju Institute of Science and Technology (GIST)
Abstract
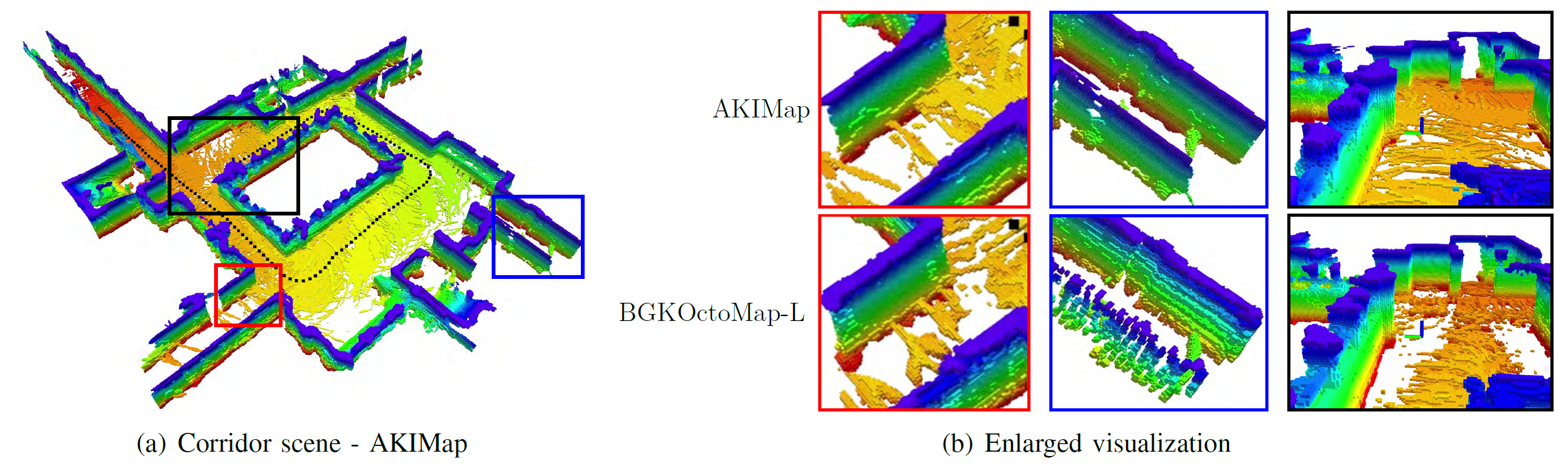
In this paper, we present a new approach, AKIMap, that uses an adaptive kernel inference for dense and sharp occupancy grid representations. Our approach is based on the multivariate kernel estimation, and we propose a simple, two-stage based method that selects an adaptive bandwidth matrix for an efficient and accurate occupancy estimation. To utilize correlations of occupancy observations given sparse and non-uniform distributions of point samples, we propose to use the covariance matrix as an initial bandwidth matrix, and then optimize the bandwidth matrix by adjusting its scale in an efficient, data-driven way for on-the-fly mapping. We demonstrate that the proposed technique estimates occupancy states more accurately than state-of-the-art methods given equal-data or equal-time settings, thanks to our adaptive inference. Furthermore, we show the practical benefits of the proposed work in on-the-fly mapping and observe that our adaptive approach shows the dense as well as sharp occupancy representations in a real environment.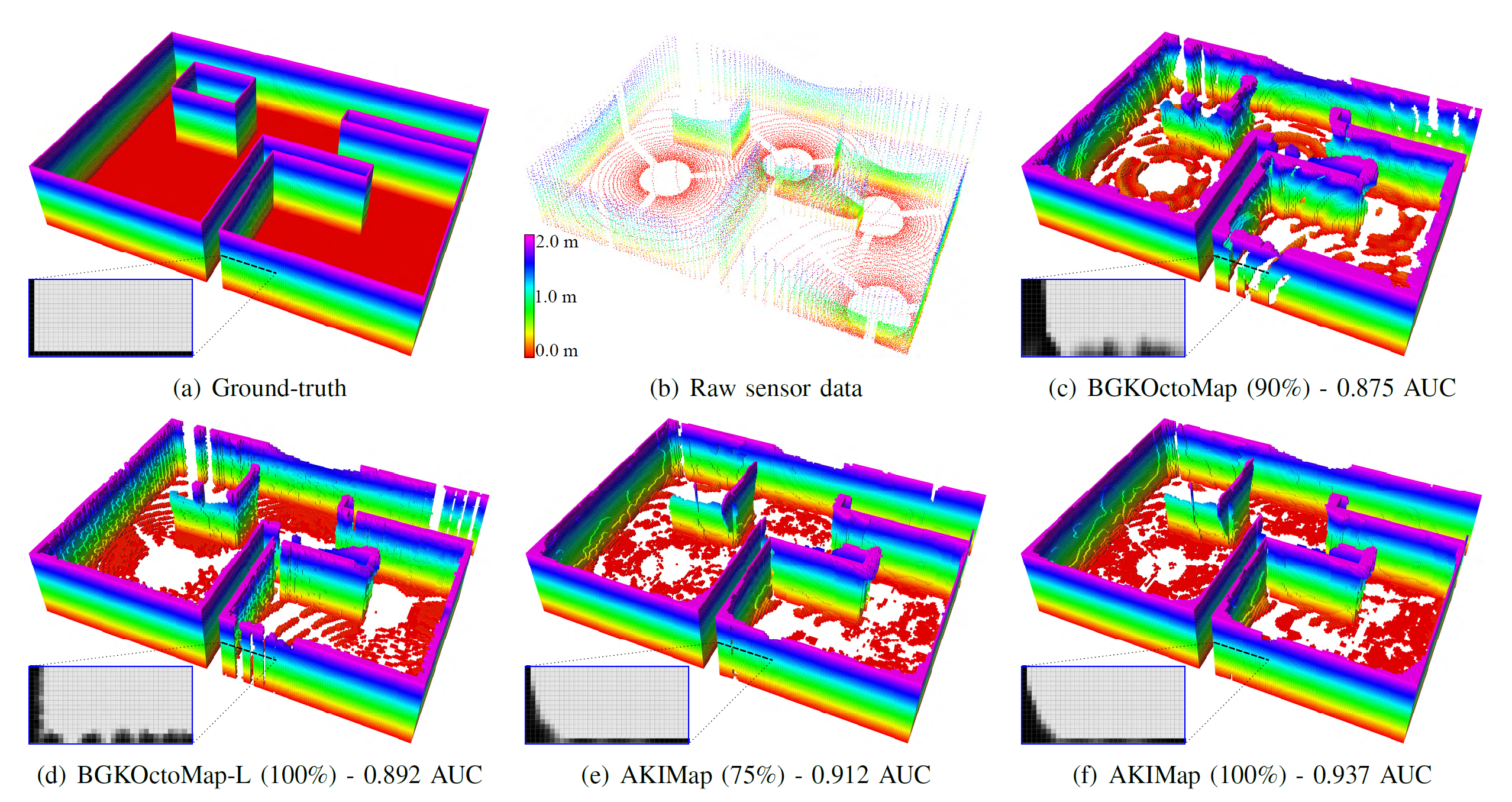
Contents
Paper: PDF(3.7MB)Source code: Github, ZIP(2.5MB)
Presentation: Video(48.6MB), PPT(85.3MB)
Bibtex:
@article{kwon2020adaptive,
title={Adaptive Kernel Inference for Dense and Sharp Occupancy Grids},
author={Kwon, Youngsun and Moon, Bochang and Yoon, Sung-Eui},
booktitle={2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year={2020},
organization={IEEE}
}